![]()
¢|Ų┬Ž┬▌dŻ║ā╚╚▌ūŅžSĖ╗ūŅ░▓╚½Ą─Ž┬▌dšŠŻĪ

Ė³ą┬Ż║2016-12-20 11:46
┤¾ąĪŻ║27.5M
Ž┬▌dĄžųĘÆ▀├ĶČ■ŠS┤a░▓čbĄĮ╩ųÖC
 50%(10Ų▒)
50%(10Ų▒) 50%(10Ų▒)
50%(10Ų▒) ES╬─╝■×gė[Ų„ė└Š├vip░µ(ES File Explorer)
ES╬─╝■×gė[Ų„ė└Š├vip░µ(ES File Explorer)
 PikPak app
PikPak app
 ╣╚ĖĶPlayĘ■äš┐“╝▄2023
╣╚ĖĶPlayĘ■äš┐“╝▄2023
 ╣╚ĖĶ┐“╝▄░▓ū┐░µ(Google Play Ę■äš)
╣╚ĖĶ┐“╝▄░▓ū┐░µ(Google Play Ę■äš)
 WaveUp▄ø╝■░▓ū┐░µ
WaveUp▄ø╝■░▓ū┐░µ
 SD┼«é“SD Maid║┌ĮĖ▀╝ē░µ
SD┼«é“SD Maid║┌ĮĖ▀╝ē░µ
 scene╣żŠ▀Žõ
scene╣żŠ▀Žõ
 iphone15─ŻöMŲ„
iphone15─ŻöMŲ„
 AutoJs─_▒Š┤¾╚½
AutoJs─_▒Š┤¾╚½
 lbeŲĮąą┐šķg
lbeŲĮąą┐šķg


Magic UFOŲõīŹŠ═╩Ūę╗┐Ņwifi┐žųŲ╦─▌S’wąąŲ„▄ø╝■Ż¼─▄ē“ų▒Įėė├╩ųÖCwifiüĒ┐žųŲ║Į┼─łDŽ±Ż¼ŽÓ«öė┌ūįĦwifiŻ¼Č°Ūę▀Ć▓╗ąĶę¬║▄ÅŖĄ─ą┼╠¢Ż¼ų▒Įėė├üĒū÷’w┐žŠ═┐╔ęį┴╦Ż¼ūī─Ń┼─│÷ŪÕ╬·Ą─║Į┐šłDŲ¼Ż¼ų▒Įė╔Žé„ĄĮ╩ųÖC╗“š▀ļŖ─X╔Ž├µĪŻ
▒Šæ¬ė├╩Ūę╗┐Ņwifié„łDĪŻ
╩ųÖC┐žųŲ╦─▌S’wąąŲ„Ą─╩ųÖCAPPĪŻ
özŽ±Ņ^Ą─łDŽ±═©▀^wifi╔Žé„ĄĮ╩ųÖCAPP,ĪŻ
╩ųÖC═©▀^wifi░l│÷┐žųŲ├³┴Ņ, ┐žųŲ╦─▌SĪŻ
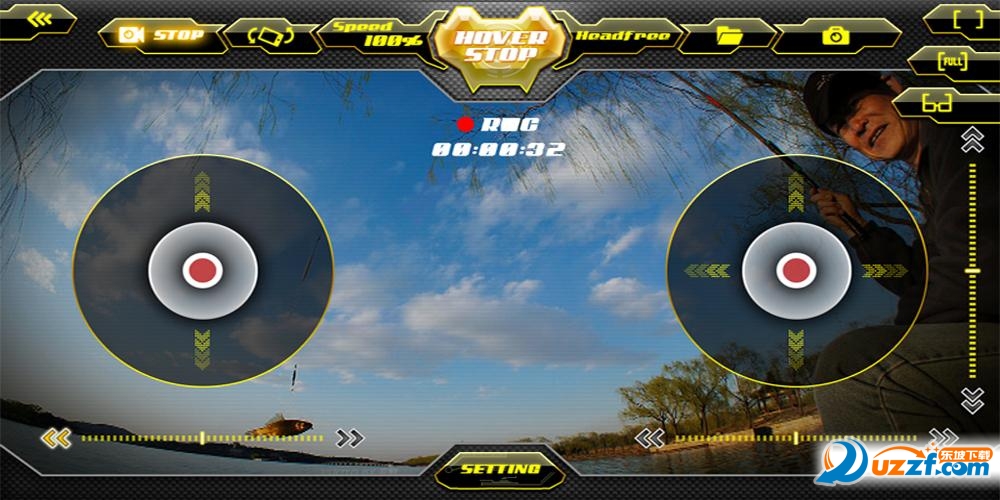
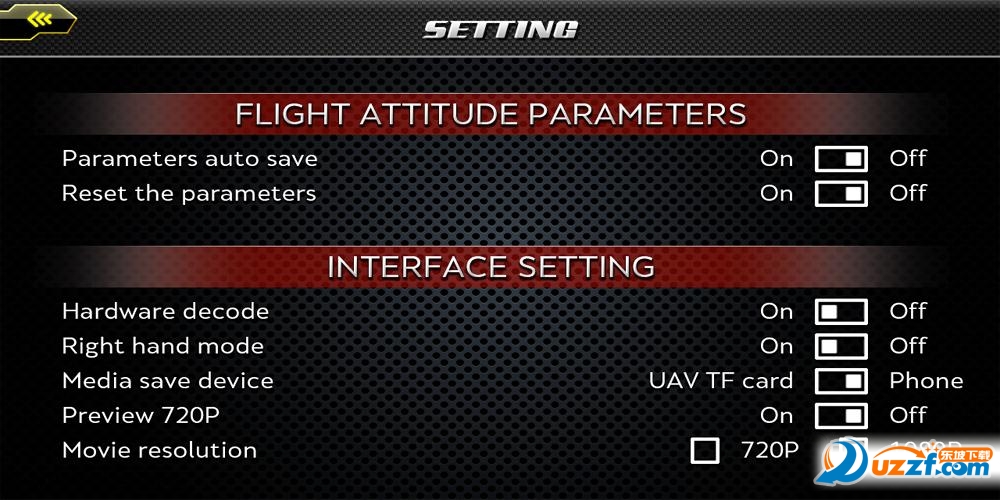
1.ūįĦC4005 FPVīŹĢr║Į┼─ĮM╝■Ż¼┐╔īŹ¼F┼─šš║═õøŽ±▓ó═©▀^FPV▄ø╝■▀MąąīŹĢré„▌öĄĮ╩ųÖC╔Ž▓źĘ┼Ż¼Ėą╩▄Ą┌ę╗ęĢėXĄ─’wąą¾w“ׯ╗
2.░▓čb┴╦Ž╚▀MĄ─ÜŌē║ėŗŻ¼īŹ¼FČ©Ė▀╣”─▄Ż¼ļp╗žÅŚ▀b┐žŲ„Ż¼Ė³╝ė╚▌ęū┐žųŲ’wÖCĖ▀Č╚Ż¼Č©³c┼─öz«ŗ├µŻ╗
3.┐╔ė├╩ųÖC▀b┐ž’wąąŲ„Ż║Ž┬▌dAPPĪ░MJX HĪ▒Ż¼┤“ķ_╩ųÖCWIFIŠWĮj┼cWIFI║Į┼─özŽ±Ņ^µ£ĮėŻ¼┐╔īŹ¼FAPP▀b┐žŻ╗
4.▓╔ė├╦─▌SļŖÖC“īäėŻ¼’wąąŲĮĘĆŻ¼┐╔▌p╦╔═Ļ│╔Ė„ĘN’wąąäėū„Ż╗
5.▓╔ė├2.4GHzūįäė╠°Ņl╝╝ągŻ¼┐╔ČÓ┼_’wąąŲ„═¼Ģr’wąąŻ╗
6.ūŅą┬6▌S═ė┬▌āx’wąą┐žųŲŽĄĮyŻ¼╩╣’wąąŲ„Ė³ĘĆČ©Ż¼▓┘ū„Ė³╚▌ęūŻ╗
7.┐╔īŹ¼F3DĘŁØLäėū„Ż╗
8.ę╗µIåóäėę╗µIĮĄ┬õŻ╗
9.Ė▀Ą═Önūā╦┘ŪąōQŻ¼▌p╦╔▀xō±’wąą╦┘Č╚Ż╗
10.┼õėą¤oŅ^─Ż╩ĮŻ¼ę╗µIĘĄ║Į╣”─▄ĪŻ
WRTnode└Ēšō╔Ž╩Ū┐╔ęįū÷’w┐žĄ─ĪŻ╦³ūįĦWiFi─ŻēK(īŹļH╔ŽTP-LINK wrxxxŽĄ┴ą┬Ęė╔Ų„ė├Ą─Š═╩ŪWRTnode░Õ)Ż¼CPU×ķMIPS╝▄śŗŻ¼┐╔ęį╦ó▀MŪČ╚ļ╩ĮLinuxŽĄĮyOpenwrtĪŻ
─Ń╦∙ąĶꬥ─╩Ūūį╝║▀BĮėę╗ŽĄ┴ąé„ĖąŲ„ĪŻ
ū„ĄĮĘĆČ©’wąąąĶę¬PID┐žųŲŻ¼ė┌╩ŪąĶę¬╚²▌S╗“┴∙▌S╝ė╦┘Č╚é„ĖąŲ„(MPU6050);
īŹ¼FČ©Ė▀ąĶę¬ÜŌē║ėŗ;
īŹ¼FµiČ©║ĮŽ“ąĶę¬┴_▒P;
īŹ¼FGPSČ©³cč▓║ĮąĶę¬GPS─ŻēK;
▀@ą®Č╝ę¬─Ńūį╝║▀BĮė▓ó└╬└╬╣╠Č©į┌─ŃĄ─’w┐ž░Õ╗“╩ŪÖC╝▄╔ŽĪŻ
╚╗║¾ī”öĄō■▀Mąą┐©Ā¢┬³×V▓©Ż¼PID┐žųŲŻ¼PWMš{ųŲŻ¼╚╗║¾Š═┐┤ĄĮ╦─▌S╗ęŲüĒ┴╦LOL.
«ö╚╗─Ńę▓┐╔ęį▀xō±īŻķTĄ─’w┐ž░Õ(é„ĖąŲ„Č╝║Ė║├Ą─)║═ķ_į┤’w┐ž│╠ą“Ż¼į┘═ŌĮėę╗éĆWRTnodeū„×ķ╝āWiFi─ŻēKĪŻ
(ķ_į┤’w┐ž▒╚╚ńMWC, APMĄ╚)
ę“×ķWRTnodeĄ─ėŗ╦Ń─▄┴”ėąŽ▐Ż¼╬ęø]ėą£yįć▀^╦³į┌┼▄ę╗éĆLinuxŻ¼▒O┬ĀŠWĮjČ╦┐┌▓ó▀Mąąū╦æBĮŌ╦ŃĄ─═¼Ģr▀Ćʱū÷ĄĮīŹĢrĒææ¬ĪŻ
▓╗▀^ÜgėŁŅ}ų„▀MąąćLįćĪŻ╬ęéāÅ─üĒ▓╗╚▒╔┘äōą┬Ą─ŽļĘ©Ż¼Č°╚▒╔┘─▄ē“īóŲõīŹ█`Ą─╚╦ĪŻ
 Ž┬▌d
ŠG╔½ĻPÖC▄ø╝■(Switch Off)
393KB /
Ž┬▌d
ŠG╔½ĻPÖC▄ø╝■(Switch Off)
393KB /
ąĪŠÄ║åįu:Switch Off
 Ž┬▌d
Windowsā×╗»┤¾Ä¤(wopti)ŠG╔½░µ
6.5M /
Ž┬▌d
Windowsā×╗»┤¾Ä¤(wopti)ŠG╔½░µ
6.5M /
ąĪŠÄ║åįu:╬─╝■Ž┬▌d║¾
 Ž┬▌d
Windowsā×╗»┤¾Ä¤
7.3M /
Ž┬▌d
Windowsā×╗»┤¾Ä¤
7.3M /
ąĪŠÄ║åįu:Å─ŽĄĮyą┼Žó
 Ž┬▌d
Ģr┐╔═©(windowsĢrńŖ╔²╝ē)
479KB /
Ž┬▌d
Ģr┐╔═©(windowsĢrńŖ╔²╝ē)
479KB /
ąĪŠÄ║åįu:windowsĢrńŖ
 Ž┬▌d
Windows XP VLK ą“┴ą╠¢╠µōQŲ„
4KB /
Ž┬▌d
Windows XP VLK ą“┴ą╠¢╠µōQŲ„
4KB /
ąĪŠÄ║åįu:ėęµI³cō¶Ī░
 Ž┬▌d
Wireshark(ūź░³╣żŠ▀)
22.5M /
Ž┬▌d
Wireshark(ūź░³╣żŠ▀)
22.5M /
ąĪŠÄ║åįu:Wireshark2
 Ž┬▌d
WinSock Expert(ŠWĮjģfūhĘų╬÷╣żŠ▀)
483KB /
Ž┬▌d
WinSock Expert(ŠWĮjģfūhĘų╬÷╣żŠ▀)
483KB /
ąĪŠÄ║åįu:ē║┐s░³ā╚Ż║
 Ž┬▌d
Window╗ę╔½░┤Ōo═╗ŲŲīŻ╝ę
6KB /
Ž┬▌d
Window╗ę╔½░┤Ōo═╗ŲŲīŻ╝ę
6KB /
ąĪŠÄ║åįu:Windows ░┤
 Ž┬▌d
Winamp
10.1M /
Ž┬▌d
Winamp
10.1M /
ąĪŠÄ║åįu:Winamp╩Ūę╗
 MT╣▄└ĒŲ„2023ūŅą┬░µ
21.1M
2.14.0 ╣┘ĘĮš²░µ
PikPak app
58.2M
1.38.1 ūŅą┬░µ
MT╣▄└ĒŲ„2023ūŅą┬░µ
21.1M
2.14.0 ╣┘ĘĮš²░µ
PikPak app
58.2M
1.38.1 ūŅą┬░µ
 ę╗µIRoot┤¾Ä¤(╚A×ķ╩ųÖCroot┤¾Ä¤░▓ū┐░µ)
8.1M
5.1.5 ūŅą┬░µ
ę╗µIRoot┤¾Ä¤(╚A×ķ╩ųÖCroot┤¾Ä¤░▓ū┐░µ)
8.1M
5.1.5 ūŅą┬░µ
 ę╗µIRootŠ½ņ`(░▓ū┐10ę╗µIroot)
4.7M
1.5.10░▓ū┐░µ
ę╗µIRootŠ½ņ`(░▓ū┐10ę╗µIroot)
4.7M
1.5.10░▓ū┐░µ
 │¼╝ēRoot┤¾Ä¤(root│¼╝ēÖÓŽ▐┤¾Ä¤2022)
6.0M
ūŅą┬░µ
│¼╝ēRoot┤¾Ä¤(root│¼╝ēÖÓŽ▐┤¾Ä¤2022)
6.0M
ūŅą┬░µ
 360╩ųÖCų·╩ųūŅą┬░µ2023
26.3M
v10.9.11 ░▓ū┐░µ
MT╣▄└ĒŲ„2023ūŅą┬░µ
21.1M
2.14.0 ╣┘ĘĮš²░µ
360╩ųÖCų·╩ųūŅą┬░µ2023
26.3M
v10.9.11 ░▓ū┐░µ
360╩ųÖCų·╩ųūŅą┬░µ2023
26.3M
v10.9.11 ░▓ū┐░µ
MT╣▄└ĒŲ„2023ūŅą┬░µ
21.1M
2.14.0 ╣┘ĘĮš²░µ
360╩ųÖCų·╩ųūŅą┬░µ2023
26.3M
v10.9.11 ░▓ū┐░µ
 ╣╚ĖĶ╚²╝■╠ūų▒ĮėŽ┬▌d(Go░▓čbŲ„)
11.2M
v4.8.7 ūŅą┬░µ
╣╚ĖĶ╚²╝■╠ūų▒ĮėŽ┬▌d(Go░▓čbŲ„)
11.2M
v4.8.7 ūŅą┬░µ
 rotationÅŖųŲÖMŲ┴app
4.9M
27.1.1 ūŅą┬ųą╬─░µ
rotationÅŖųŲÖMŲ┴app
4.9M
27.1.1 ūŅą┬ųą╬─░µ
 ÅŖųŲÖMŲ┴─ŻöMŲ„╩ųÖC░µ(Rotation)
4.9M
27.1.1 ūŅą┬░µ
ÅŖųŲÖMŲ┴─ŻöMŲ„╩ųÖC░µ(Rotation)
4.9M
27.1.1 ūŅą┬░µ
 Ę└ķW┐“╝▄ūŅą┬2023
15.7M
9.9.9 ├Ōroot
Ę└ķW┐“╝▄ūŅą┬2023
15.7M
9.9.9 ├Ōroot
ŠWėčįušō